Перспектива реализации на производстве достижений последних проектов Бионической Образовательной Сети, основанной компанией Festo, и особые механизмы, которые можно позаимствовать у природы, – были озвучены в рамках пресс-конференции, состоявшейся 2-3 декабря на новом заводе Festo в Шарнхаузене. Смогут ли ультралегкие летающие объекты робототехники проложить путь для создания новых систем управления и мониторинга? Станет ли адаптивный захват, разработанный по принципу действия языка хамелеона, ключом к созданию эластичных механизмов захвата?
Данные вопросы получили наглядные ответы. На производстве технологии автоматизации выполняют типичные задачи такие, как захват, перемещение и позиционирование продуктов, либо отвечают за контроль и регулирование процессов. Природа выполняет все эти задачи в совершенстве, при этом изящная простота и энергоэффективность данных процессов – нечто само собой разумеющееся. В этом контексте решение взглянуть на подобные природные явления более внимательно и попытаться научиться этому у природы кажется более чем очевидным. Новые проекты Бионической Образовательной Сети предлагают наглядные подходы для решения многих задач производства будущего. К примеру, бионические роботы BionicANTs и eMotionButterflies иллюстрируют, как коммуникацию между отдельными элементами можно объединить в сеть и, таким образом, в совокупности создать систему, наделенную интеллектом. А устройство FlexShapeGripper является примером того, как гибкий и адаптивный природный механизм захвата обрел потенциальное применение в мире техники.
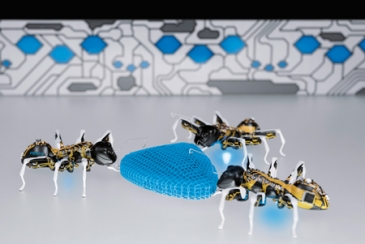
BionicANTs – высокоинтегрированные отдельные системы для решения коллективной задачи
В рамках проекта BionicANTs разработчики Festo в качестве модели для подражания ориентировались не только на хрупкую анатомическую структуру насекомого. Впервые в мире технологий была передана модель поведения живых существ с использованием сложных алгоритмов управления. «Наподобие природных прототипов, роботы BionicANTs взаимодействуют в соответствии с четкими правилами», – объясняет д-р Генрих Фронтзек, руководитель отдела Корпоративных Коммуникаций. Теоретически модель кооперативного поведения предлагает интересные подходы к производству. Системы производства нового поколения будут основываться на интеллектуальных компонентах, которые способны гибко приспосабливаться к различным производственным задачам, подчиняясь командам устройств высшего уровня управления. «Они общаются друг с другом, координируя свои действия и движения на благо общей цели. Таким образом, каждый муравей принимает решения самостоятельно, однако исключительно в рамках коллективной задачи», – утверждает д-р Фронтзек.
eMotionButterflies – ультралегкие летающие объекты с моделью коллективного поведения
Полет – это не только одно из давних стремлений человечества, но и частая тема дискуссий в рамках Бионической Образовательной Сети. В создании искусственных бабочек eMotionButterflies Festo сочетало ультралегкую конструкцию с координированной коллективной моделью полета. Бабочки eMotionButterflies олицетворяют и наглядно демонстрируют такие сложные вопросы, стоящие на пороге будущего производства, как функциональная интеграция, легковесная конструкция и сетевая коммуникация между отдельными устройствами, и что примечательно, в режиме реального времени.
«Впрочем, речь идет не о будущих полетах роботов eMotionButterflies на производстве; напротив, данная разработка предлагает новые подходы к функционированию общей системы, объединенной в сеть, либо показывает нам возможные варианты развития будущей системы логистики в промышленности», подчеркивает д-р Фронтзек. Сетевое управление и система мониторинга безошибочно координируют в автономном режиме полет каждого объекта в пространстве. Используемая система коммуникаций и технология датчиков представляют собой внутреннюю систему GPS, контролирующую движение бабочек в группе без риска для их столкновения.
FlexShapeGripper – модель захвата, разработанная по образцу действия языка хамелеона
«Особая, в сущности, революционная черта новой разработки FlexShapeGripper состоит в том, что робот может захватывать, поднимать и ставить сразу несколько объектов, при этом весьма разнообразных по своей форме, и все это за один шаг захвата – без необходимости ручной переналадки», – говорит д-р Фронтзек. На разработку данного механизм захвата вдохновило то, как устроен язык хамелеона. Аналогичный эффект удалось достичь благодаря силиконовому наконечнику, наполненному водой, который в процессе захвата эластично обволакивает предметы, повторяя их форму. В будущем устройство FlexShapeGripper может быть использовано в любых локациях, где необходимо одновременно перемещать несколько объектов, отличающихся по форме, к примеру, в секторе работы роботов, выполняющих сборку или перемещение небольших компонентов.